本虚拟实验教学项目的教学目标如下:
1)了解ITTC船舶操纵性相关规程;
2)了解船舶设计阶段操纵性预报方法(数据库或经验公式估算方法、自航船模操纵性试验方法、数学模型加计算机模拟方法、基于CFD的数值模拟方法、系统辨识方法等)及舵的类型及其工作原理;
3)了解虚拟现实技术的基本理论及其在船舶船舶操纵性研究中的应用;
4)熟悉船舶操纵性虚拟试航实验操作流程和结果分析方法;
5)掌握船舶操纵性海试的过程及要求。
1)实验原理
以船舶数字化智能设计系统(KSHIP)为基础,利用VR虚拟现实技术和3D成像投影技术,通过多路立体信号的同步演示对船舶操纵性海试全过程进行计算机模拟,将操纵性求解器分析结果在虚拟三维环境中进行同步展示,实现学生在虚拟环境下开展船舶操纵性海试实验,进而深入了解船舶操纵性预报方法、掌握船舶操纵性海试的实际操作和相关要求。
知识点:共 4 个
1)船舶操纵性预报方法;
2)船舶操纵性衡准要求;
3)船舶操纵性海试规程及结果分析方法;
4)虚拟现实基本理论。
基于VR的船舶操纵性虚拟海试实验教学项目依托VR虚拟现实、三维运动模拟、人机交互等技术,构建虚拟的船舶操纵性海试环境和目标船舶模型,依托“以虚带实、以虚补实、以虚验实、虚实结合”的实验教学方法,指导学生在虚拟环境中开展实验,并与实船海试结果进行分析对比,达到教学大纲的相关要求。
实验准备阶段,对ITTC船舶操纵性相关规程、船舶操纵性预报的常规方法、舵的类型及工作原理、虚拟现实基本理论等内容进行集中讲解,使学生对虚拟现实技术、船舶操纵性基本理论及海试的相关要求有一定的了解。
实验过程中,学生分组开展实验,在船舶虚拟海试场景仿真界面上完成船舶尺度重量、装载情况、操纵特性参数以及外部条件等的设置后运行,启动系统求解器运算得到船舶虚拟海试的运动轨迹以及螺旋桨转速、前进速度和舵角等相关结果,系统对船舶运动结果进行转换编码,生成相应的控制信号,在虚拟现实设备中实现船舶运动全过程的三维模拟输出,完成船舶操纵性虚拟海试实验。实验结束后,开展结果分析对比,形成实验报告;实验过程中同步开展对各项操作环节的评价。
本实验教学项目指导学生了解虚拟现实技术的基本理论,掌握船舶操纵性预报方法和船舶操纵性海试规程,熟悉船舶操纵性海试结果分析方法,培养学生理论实践相结合的科研思维能力和解决问题的综合能力。
基于实验教学项目的网课相关要求,本项目分为网络授课和虚拟现实实验室现场授课两套方案。
方案一 网络授课
①实验前,将操作系统和网络相关参数要求进行调整设置,登录本实验教学项目的网址链接,进入实验系统并进行预习。
②在基于VR的船舶操纵性虚拟海试实验系统中选择船舶模型(如图1所示),定义船舶的尺寸、质量、典型装载情况(满载/压载)、受风面积等参数,以及船舶的操纵特性参数。
③在系统中定义外部条件,如底部标高、风浪流的具体参数。
④在系统中定义操纵、航速、航向、自动驾驶仪设置、时间步长、起始点等参数(如图2所示)。
⑤完成参数设置后,点击运行开始操纵性试验模拟,分别对船舶满载和压载两种不同的装载情况,进行回转试验、紧急停船试验和Z形操纵试验的模拟(如图3所示)。
⑥实验过程中,学生可通过网络远程观看虚拟实验室中目标船舶在不同装载情况下,上述三项操纵性海试虚拟实验的动画,了解各项实验中船舶的运动轨迹(如图4所示)。
⑦试验结束后,系统将分别输出试验数据(航迹、艏向角、速度、舵角等),学生整理数据(如图5、图6所示)。
⑧学生将整理好的数据与目标船舶实船操纵性海试的结果进行对比。
⑨学生根据IMO操纵性衡准规范,对虚拟海试实验数据结果开展目标船舶回转性、初始回转性、保向性、停船性等指标的评价,系统可显示后处理结果(如图7所示)。
⑩根据数据分析结果,形成实验报告。
方案二 虚拟现实实验室现场授课(备案)
①学生抽题卡,根据题卡,选择相应的练习,练习包括不同目标船舶的操纵性虚拟海试模拟,包括回转试验、Z形操纵试验、停船试验。
②在基于VR的船舶操纵性虚拟海试实验系统中选择船舶模型(如图
1所示),定义船舶的尺寸、质量、典型装载情况(满载/压载)、受风面积等参数,以及船舶的操纵特性参数。③在系统中定义外部条件,如底部标高、风浪流的具体参数。
④在系统中定义操纵、航速、航向、自动驾驶仪设置、时间步长、起始点等参数(如图2所示)。
⑤完成参数设置后,点击运行开始操纵性试验模拟,分别对船舶满载和压载两种不同的装载情况,进行回转试验、紧急停船试验和Z形操纵试验的模拟(如图3所示)。
⑥实验过程中,学生通过佩戴环形屏幕/VR头盔和手柄操纵等工具,体验虚拟现实实验系统中目标船舶在不同装载情况下,上述三项操纵性虚拟海试的实际运动情况(如图4所示)。
⑦试验结束后,系统将分别输出试验数据(航迹、艏向角、速度、舵角等),学生整理数据(如图5、图6所示)。
⑧学生将整理好的数据与目标船舶实船操纵性海试的结果进行对比。
⑨学生根据IMO操纵性衡准规范,对虚拟海试实验数据结果开展目标船舶回转性、初始回转性、保向性、停船性等指标的评价,系统可显示后处理结果(如图7所示)。
⑩根据数据分析结果,形成实验报告。
a)1000TEU集装箱船
b)KVLCC(266,000DWT级)

图1 模型的选取
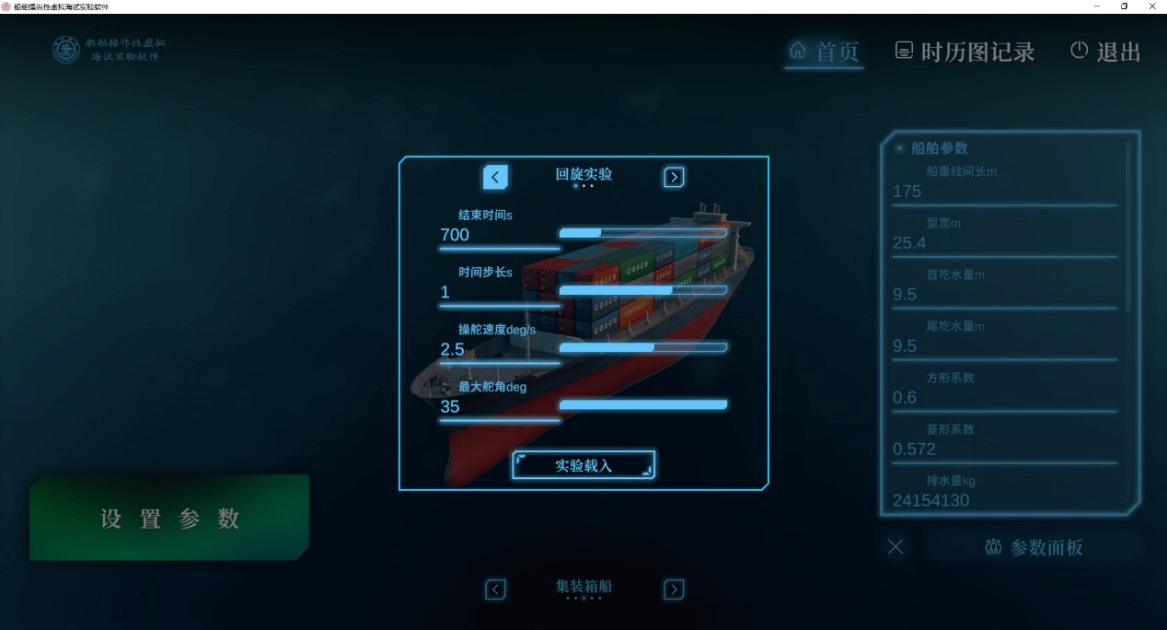
图2 参数设置
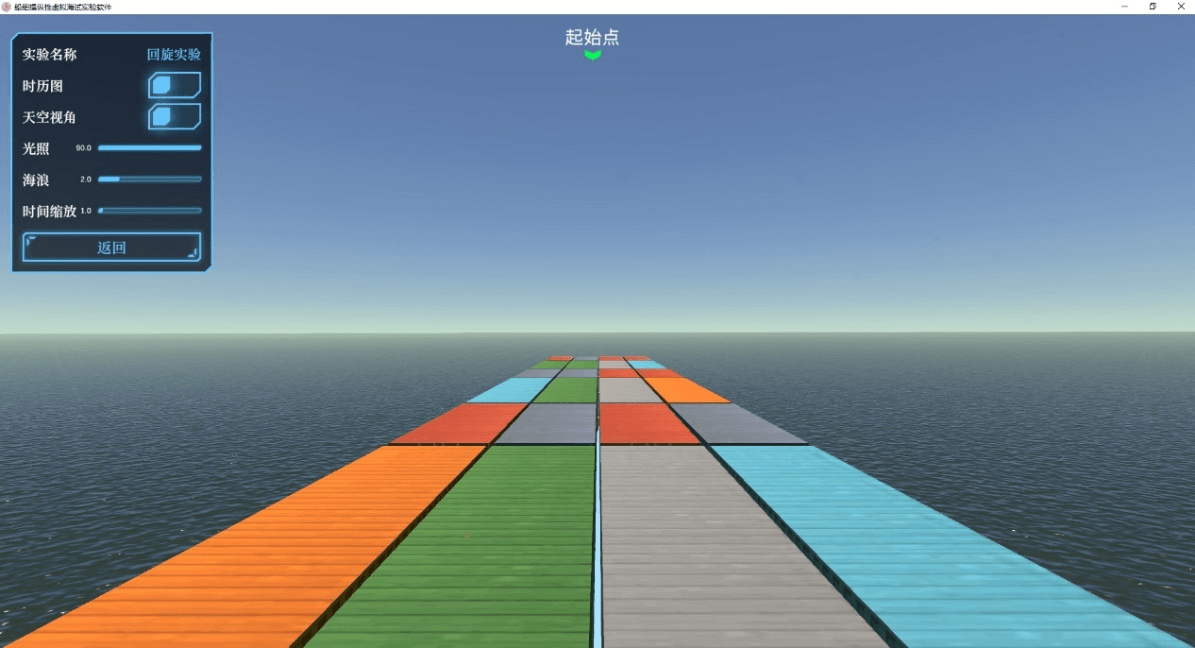
图3 实验界面

图4 实验过程与视角切换
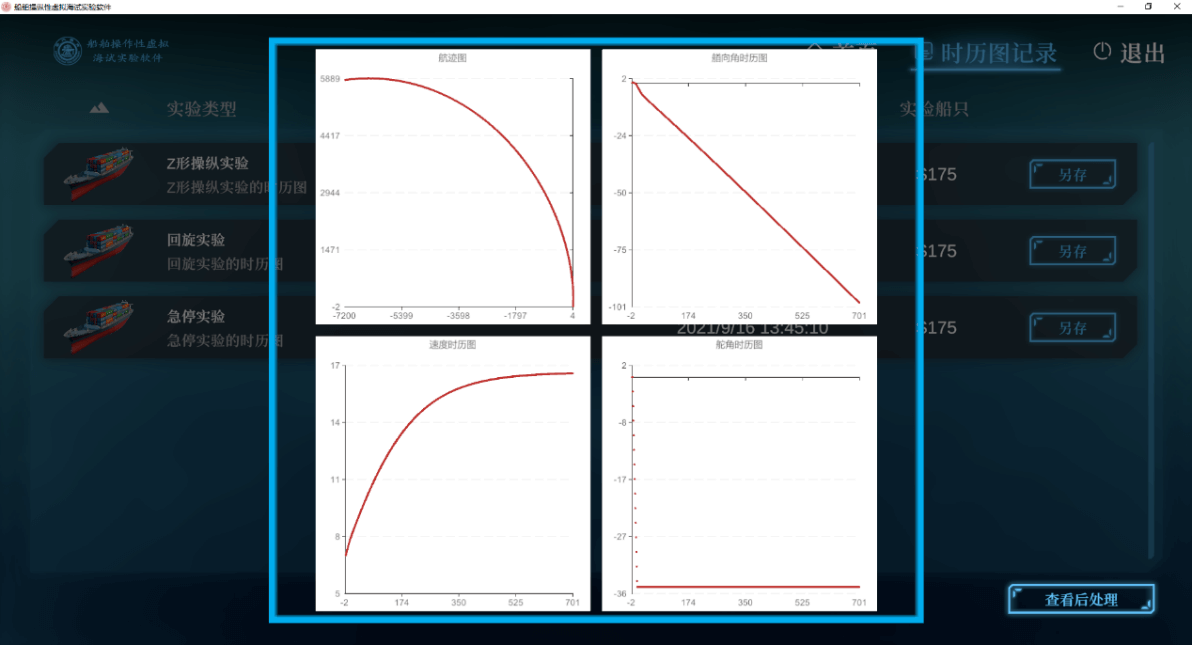
图5 数据显示

图6 数据保存
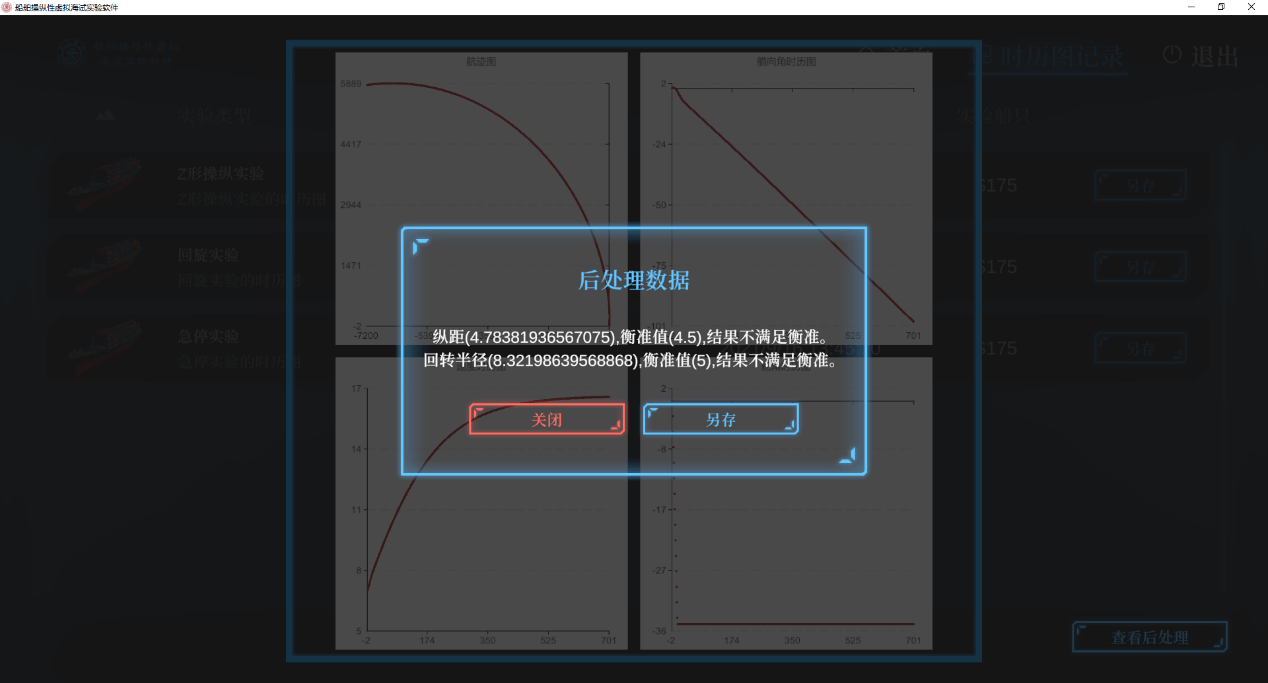
图7 数据后处理
实验过程中,不同船舶模型的选取、船舶主尺度与装载情况等船舶参数设置的不同、环境参数及航速、航向与时间步长等实验参数设置的不同,均会对各次实验最终输出的船舶运动时历曲线(数据)产生影响,从而决定了该次实验的结果在后处理环节中能否满足IMO相应衡准的要求。
本实验教学项目课程总成绩满分为100分,主要通过实验操作与实验报告的完成情况,来考核学生对实验基本理论、操作过程和结果分析方法的掌握情况。实验过程中要求记录每步的实验结果,最终的实验结果与结论要求以实验报告(本部分共60分)的形式完成并提交。实验结束后,教师对学生的船舶操纵性虚拟海试实验整体操作过程、完成情况及实验数据与实验结论的准确有效性等进行评价,给出相应的实验操作分(本部分共40分)。
1 网络要求
(1)客户端到服务器的带宽要求
20Mbps宽带。
(2)能够支持的同时在线人数
20人。
(3)非操作系统软件要求
■谷歌浏览器 ■IE浏览器 ■360浏览器 ■火狐浏览器
(4)需要特定插件 ○是 ●否
1)计算机硬件配置要求
核心2.2GHz;8GB内存
2)其他计算终端硬件配置要求
无
3)计算机特殊外置硬件要求
无
4)其他计算终端特殊外置硬件要求:
(1)计算机操作系统和版本要求
Windows 10及以上操作系统
(2)其他计算终端操作系统和版本要求
-
(3)是否支持移动端:○是 ●否